精雕细琢高档品质,禅意荷韵品味高雅
整体解决方案
全国服务热线:

电 话:152-0118-7025(杨睿)
136-0494-6019(侯文鑫)
地 址:辽宁省大连市甘井子区
网址:www.wisdomcnc.net
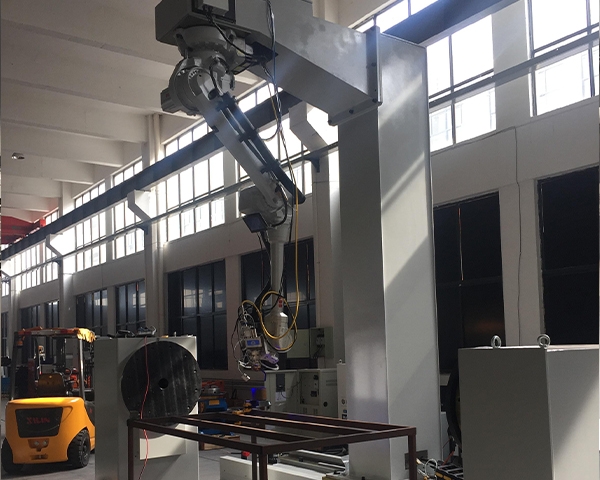
机器人大连工作站的自动化操作是通过集成多种优良技术实现的,包括机器人技术、传感器技术、控制系统、人工智能以及网络通信等。以下从硬件、软件和系统集成三个方面详细阐述机器人工作站如何实现自动化操作。
一、硬件部分
机器人本体
机器人是工作站的核心设备,根据应用场景不同,机器人可以是工业机器人(如六轴机械臂)、协作机器人、移动机器人或特种机器人。机器人通过高精度的运动控制完成抓取、搬运、装配、焊接等任务。
末端执行器
末端执行器是机器人完成具体任务的工具,例如夹爪、吸盘、焊枪、喷涂头等。根据任务需求,末端执行器可以快速更换,以实现多功能操作。
传感器系统
传感器是实现自动化的关键,主要包括:
视觉传感器:用于识别物体位置、形状和颜色,引导机器人准确定位。
力传感器:用于检测机器人与物体之间的接触力,实现柔顺操作。
距离传感器:用于检测物体与机器人之间的距离,避免碰撞。
环境传感器:监测温度、湿度、气体浓度等环境参数,确保工作环境安全。
传送与定位设备
传送带、旋转台、定位夹具等设备用于将工件准确输送到机器人工作区域,确保机器人能够高效完成任务。
控制与驱动系统
包括伺服电机、驱动器、PLC(可编程逻辑控制器)等,用于准确控制机器人的运动和工作流程。
二、软件部分
机器人控制系统
机器人控制系统是自动化操作的核心,负责规划机器人的运动轨迹、协调各设备的动作以及监控运行状态。常见的控制系统包括ABB的IRC5、KUKA的KRC、FANUC的R-30iB等。
编程与仿真软件
编程软件:用于编写机器人运行程序,支持离线编程和在线调试。常见的编程语言包括RAPID(ABB)、KRL(KUKA)等。
仿真软件:如RobotStudio、RoboDK等,用于在虚拟环境中模拟机器人工作流程,优化路径规划,减少实际调试时间。
人工智能与机器学习
通过AI算法,机器人可以实现更复杂的任务,例如:
视觉识别:通过深度学习算法识别复杂物体。
路径优化:通过强化学习算法优化运动轨迹。
故障预测:通过数据分析预测设备故障,实现预防性维护。
人机交互界面(HMI)
通过触摸屏、语音控制或手势识别等方式,操作人员可以方便地监控和调整机器人工作状态。
三、系统集成
多设备协同
机器人工作站通常需要与多台设备协同工作,例如CNC机床、AGV小车、检测设备等。通过工业总线(如EtherCAT、PROFINET)或工业以太网实现设备间的实时通信和数据交换。
物联网(IoT)与云平台
通过物联网技术,机器人工作站可以与云端平台连接,实现远程监控、数据分析和系统优化。例如:
实时监控:通过云平台查看机器人运行状态。
数据分析:利用大数据技术分析生产数据,优化生产效率。
远程维护:通过云平台进行远程诊断和软件更新。
安全与防护系统
自动化操作需要确保人机安全,常见的安全措施包括:
安全围栏:防止人员误入危险区域。
急停按钮:在紧急情况下快速停止机器人运行。
安全传感器:检测人员接近,自动降低机器人速度或停止运行。
标准化与模块化设计
通过标准化接口和模块化设计,机器人工作站可以快速适应不同的生产需求,缩短部署时间。
四、典型应用场景
制造业
在汽车、电子、家电等行业,机器人工作站用于装配、焊接、喷涂、检测等任务,大幅提高生产效率和产品质量。
物流与仓储
在物流领域,机器人工作站用于分拣、码垛、包装等任务,结合AGV和仓储管理系统实现全流程自动化。
医疗与实验室
在医疗领域,机器人工作站用于手术辅助、药品分拣、样本检测等任务,提高精度和安全性。
农业与食品加工
在农业领域,机器人工作站用于采摘、分拣、包装等任务,提高生产效率并减少人工成本。
五、未来发展趋势
更智能的机器人
随着AI技术的发展,机器人将具备更强的感知、决策和学习能力,能够处理更复杂的任务。
更灵活的协作
协作机器人(Cobot)将与人类更紧密地合作,实现人机共融的工作环境。
更广泛的网络化
通过5G和工业互联网,机器人工作站将实现更高效的远程控制和数据共享。
更绿色的设计
未来机器人工作站将更加注重节能环保,减少能源消耗和环境污染。
总之,机器人工作站的自动化操作是通过硬件、软件和系统集成的高度协同实现的。随着技术的不断进步,机器人工作站将在更多领域发挥重要作用,推动工业和社会向智能化方向发展。