精雕细琢高档品质,禅意荷韵品味高雅
整体解决方案
全国服务热线:

电 话:152-0118-7025(杨睿)
136-0494-6019(侯文鑫)
地 址:辽宁省大连市甘井子区
网址:www.wisdomcnc.net
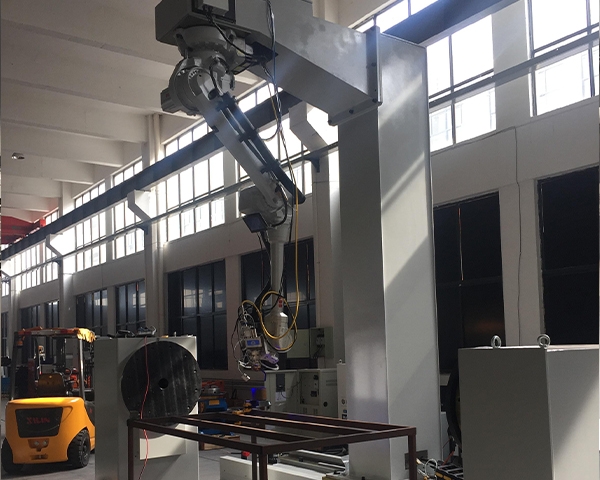
在工业自动化领域,机器人大连工作站的无缝对接是实现高效、柔性生产的关键。它意味着不同机器人、设备、系统之间能够顺畅地进行信息交互和任务协作,就像一个整体一样运作。要实现这种无缝对接,需要从硬件、软件、通信等多个层面进行综合考虑和设计。
一、硬件层面的无缝对接
标准化接口:采用统一的机械接口、电气接口和通信接口,例如机械臂末端执行器采用标准化的法兰盘,方便快速更换工具;电气接口采用统一的连接器和线缆标准,确保信号传输的可靠性;通信接口采用工业以太网、Profinet等标准协议,实现设备间的互联互通。
模块化设计:将工作站分解为功能独立的模块,例如机器人模块、视觉模块、输送模块等,每个模块都具备标准的接口和通信协议,方便根据生产需求进行灵活组合和扩展。
高精度定位:利用激光跟踪仪、视觉系统等高精度定位设备,确保机器人、工件、夹具等之间的相对位置准确无误,为后续的精准操作奠定基础。
二、软件层面的无缝对接
统一编程平台:采用统一的机器人编程软件,例如ROS、V-REP等,方便对不同品牌、型号的机器人进行编程和控制,降低学习成本和开发难度。
数据共享与协同:建立统一的数据平台,实现机器人、传感器、控制系统之间的数据共享和协同,例如将机器人的运动轨迹、传感器的检测结果、控制系统的状态信息等实时上传到数据平台,并进行统一分析和处理。
智能算法应用:利用人工智能、机器学习等算法,提升机器人工作站的智能化水平,例如通过机器学习算法优化机器人的运动轨迹,提高生产效率;通过人工智能算法实现机器人的自主决策,提高生产柔性。
三、通信层面的无缝对接
高速稳定的网络:采用高速、稳定的工业以太网、5G等网络技术,确保机器人、设备、系统之间的实时通信和数据传输,例如将机器人的运动控制指令、传感器的检测数据、控制系统的状态信息等实时传输到相应的设备或系统。
实时性与可靠性:采用实时操作系统、时间敏感网络等技术,确保通信的实时性和可靠性,例如在机器人协作场景中,需要确保多个机器人之间的运动控制指令能够实时同步,避免碰撞和干涉。
安全性与可扩展性:采用加密技术、身份认证等技术,确保通信的安全性和可扩展性,例如在远程控制场景中,需要确保通信数据的安全性和完整性,防止黑客攻击和数据泄露。
四、其他方面的无缝对接
人机交互:设计友好的人机交互界面,方便操作人员对机器人工作站进行监控、操作和维护,例如采用触摸屏、语音识别等技术,简化操作流程,提高操作效率。
安全防护:设置完善的安全防护措施,例如安全围栏、急停按钮、安全光幕等,确保机器人工作站的安全运行,防止人员伤害和设备损坏。
维护保养:制定完善的维护保养计划,定期对机器人工作站进行维护保养,确保设备的稳定运行,延长设备的使用寿命。
实现机器人工作站无缝对接的意义
提高生产效率:通过无缝对接,可以减少设备之间的等待时间和调试时间,提高生产效率。
降低生产成本:通过标准化、模块化设计,可以降低设备的采购成本和维护成本。
提高生产柔性:通过灵活的组合和扩展,可以快速适应不同产品的生产需求,提高生产柔性。
提升产品质量:通过高精度定位和智能算法,可以提高产品的加工精度和质量。
机器人工作站的无缝对接是一个复杂的系统工程,需要从硬件、软件、通信等多个层面进行综合考虑和设计。随着技术的不断发展,机器人工作站的无缝对接将越来越成熟,为工业自动化的发展提供更强大的动力。